圖片:
圖片:
(1)步進電動機的控制方法
由步進電動機的工作原理知道,要使電動機正常的一步一步地運行,控制脈沖必須按一定的順序分別供給電動機各相。例如三相單拍驅動方式,供給脈沖的順序為A—B—C—A或A—C—B—A,稱為環形脈沖分配。脈沖分配有兩種方式:一種是硬件脈沖分配(或稱為脈沖分配器),另一種是軟件脈沖分配,是由計算機的軟件完成的。
① 脈沖分配器 脈沖分配器可以用門電路及邏輯電路構成,提供符合步進電動機控制指令所需的順序脈沖。按其電路結構不同,可分為TTL集成電路和CMOS集成電路。
這兩種脈沖分配器的工作方法基本相同。即當各個引腳連接好之后,通過一個脈沖輸入端控制步進的速度;另一個輸入端控制電動機的轉向,并有與步進電動機相數相同的輸出端分別控制電動機的各相。這種硬件脈沖分配器通常都包含在步進電動機驅動控制電源內。數控系統通過插補運算,得出每個坐標軸的位移信號,通過輸出接口,向步進電動機驅動控制電源定時發出位移脈沖信號和正反轉信號。
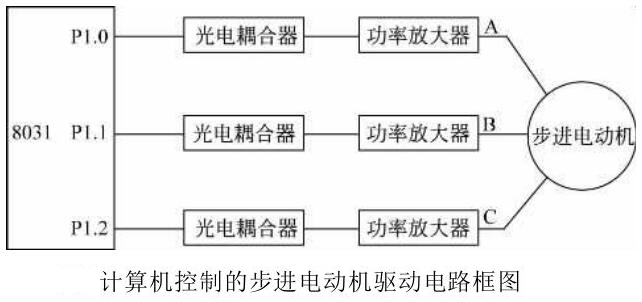
② 軟件脈沖分配 在計算機控制的步進電動機驅動系統中,可以采用軟件的方法實現環形脈沖分配。
上圖是一個8031單片機與步進電動機驅動電路接口連接的框圖。P1口的三個引腳經過光電隔離、功率放大之后,分別與電動機的A、B、C三相連接。
采用軟件進行脈沖分配雖然增加了軟件編程的復雜程度,但它省去了硬件環形分配器。系統減少了器件,降低了成本,也提高了系統的可靠性。
(2)步進電動機的驅動電源
環形脈沖分配器輸出的電流很小(毫安級),必須經過功率放大。過去采用單電壓驅動電路,后來常用高低壓驅動電路,現在則比較多地采用恒流斬波和調頻調壓等形式的驅動電路。下面介紹單電壓驅動電路的簡單原理和特點。
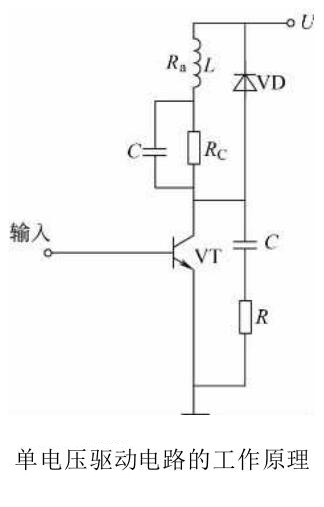
單電壓驅動電路的工作原理如下圖。
圖中L為步進電動機勵磁繞組的電感,Ra為繞阻電阻,RC為外接電阻。電阻RC并聯一電容C(可以提高負載瞬間電流),從而提高電動機的快速響應能力和啟動性能。續流二極管VD和阻容吸收回路RC,是功率管VT的保護電路。
單電壓驅動電路的優點是線路簡單,缺點是電流上升不夠快,高頻時帶負載能力低。
(3)步進電動機的細分驅動技術
在實際應用中,為了提高進給運動的分辨率,要求對步距角進一步細分。在不改變步進電動機結構的前提下,為了達到這一目的,將額定電流以階梯波的方式輸入。此時,電流分成很多個臺階,則轉子就以同樣的步數轉過一個電動機固有的步距角。這樣將一個步距角細分成若干步的驅動方法稱為細分驅動。
細分驅動的優點是使步距角減小,運行平穩,提高勻速性,并能減弱或消除振蕩。
 滬公網安備31010802001143號
滬公網安備31010802001143號

