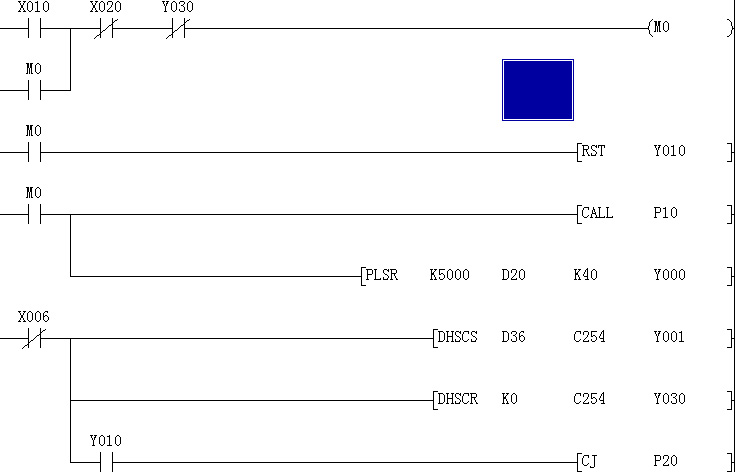
小弟初學PLC,正在做畢業設計,希望各位高手幫忙看一下上面這個梯形圖是否正確
程序是用PLC的高速計數去實現步進電機的定位,我用的是專用步進電機驅動器,Y000為脈沖輸出到驅動器 Y010為驅動器方向控制,通斷實現正反轉,其中P10是從觸摸屏輸入數據后計算出來的總脈沖的子程序,X010是啟動按鈕 X020為急停按鈕 Y030是自動停止
我大概的思路是 啟動X010,然后先給驅動器一個正轉信號(因為驅動器要求先有控制信號再有脈沖信號),然后調用子程序計算脈沖后輸出脈沖到Y000來驅動步進電機移動,當到達指令的脈沖,也就是從觸摸屏輸入的位移到達后,立即給一個反轉信號即Y010,然后再調用脈沖計算子程序,再返回到原點,當到達原點后自動斷開Y030,停機
脈沖計算子程序我沒給出
 滬公網安備31010802001143號
滬公網安備31010802001143號

