新手學習中......
向各位前輩請教!
需求:
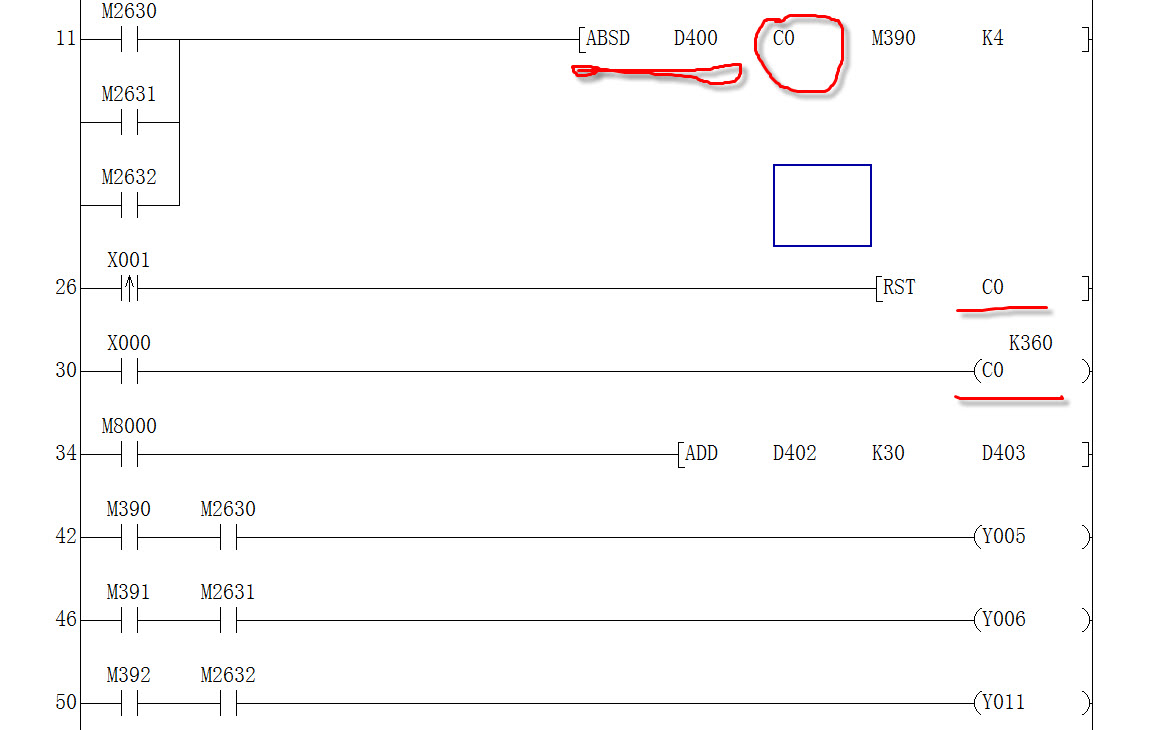
電機旋轉一周,有幾個執行機構在一定角度上動作,(如通氣、上液等)也就是需要控制各個執行機構的起止角度,程序如下圖:
其中:
X0:編碼器A相,分辨率360p/圈;
X1:編碼器Z相(用為原點);
Y5、Y6、Y11:輸出到執行機構
另:D401~D407,除D403外都是觸摸屏輸入,范圍為0~359之間。
現象:
當電機轉速小于等于60rpm時,程序能正常工作;但當速度大于60rpm時,輸出不正常了。
問題:
1、是否因為C0是普通計數器,速度跟不上?
2、簡單程序正常工作范圍的轉速要比綜合(大)程序的高?
3、換為C235后的高速計數器,程序需要改為DABSD,即,32位的,D400就亂了,請教一下,是否需要使用高速計數器?
請高手指教!
或者還有沒有別的好辦法?
謝謝!
[ 此帖被土老莫在2020-08-06 17:09重新編輯 ]
 滬公網安備31010802001143號
滬公網安備31010802001143號

