圖片:

圖片:
圖片:

圖片:
圖片:

圖片:

圖片:

圖片:
圖片:

圖片:
圖片:
PoliPLC是不一樣的PLC。有著不一樣的編程理念并且專注于機械自動化行業的應用。相對于傳統的PLC,主要有如下優勢。
Ø 提出了任務的概念,方便多任務編程。
Ø 除了支持傳統的梯形圖編程之外,還支持了堆砌式的順控型編程。梯形圖程序可以和順控型程序交替混合執行。我們知道,梯形圖的優勢在于可以直觀的處理邏輯問題,而缺點是解決順控問題時比較繁瑣(盡管有了狀態指令)。而順控程序卻可以很好的解決這個問題。利用梯形圖所表示的掃描程序和順控程序相結合的方式,可以比較完美的解決自動化編程中所遇到的各類問題。
Ø 豐富的位置控制指令。
Ø PoliPLC F101提供了各種常見結構的四軸以下機器人的支持。對于大多數類型的四軸以下的機器人,我們都提供了靈活的支持方式。這樣可以解決單純的位置控制難以解決的問題,例如軌跡規劃的問題。
Ø PoliPLC R101提供了各種常見結構的六軸機器人的支持。
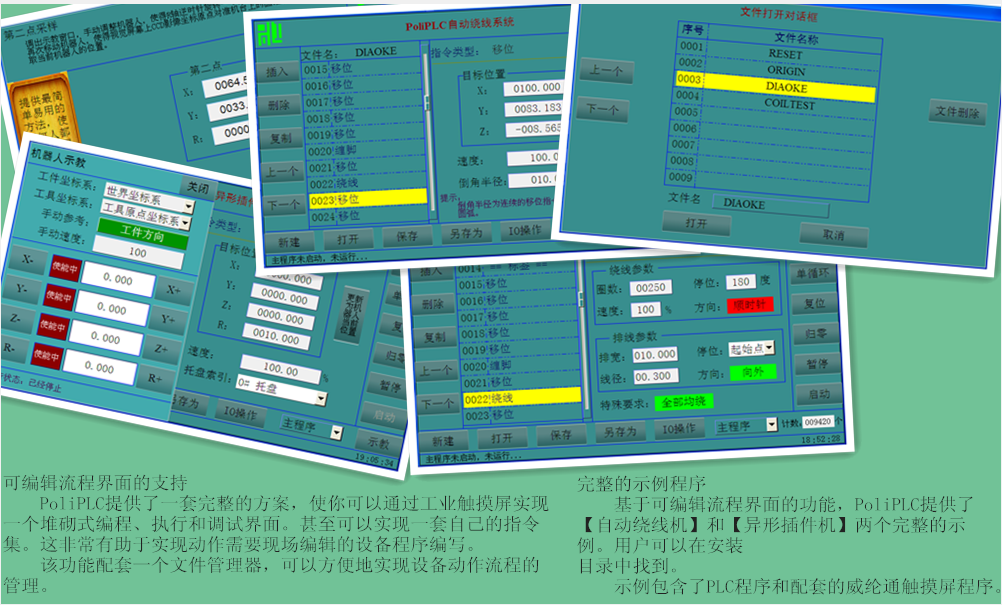
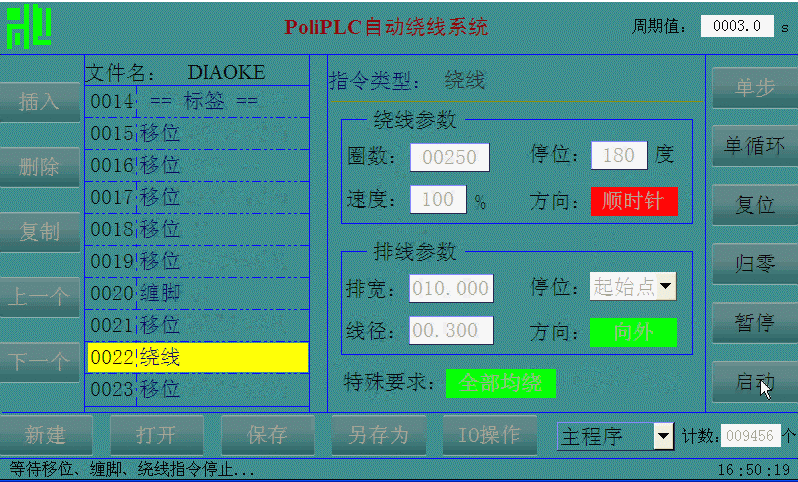
Ø PoliPLC C101提供了自動繞線機的支持。
Ø 完善的離線模擬和在線監控功能。使你在即便是沒有PLC實體的時候也可以學習編程,并且模擬運行。
Ø 只需要設置而不需要編程(或者少量編程)就可以實現的暫停和恢復功能。
Ø 只需要少許設置就能夠實現的程序各任務監視功能。這將大大提高設備的可監視性能,為設備的維護和故障查詢提供最多的信息。
Ø 只需要少許設置就能夠實現的超時報警功能。
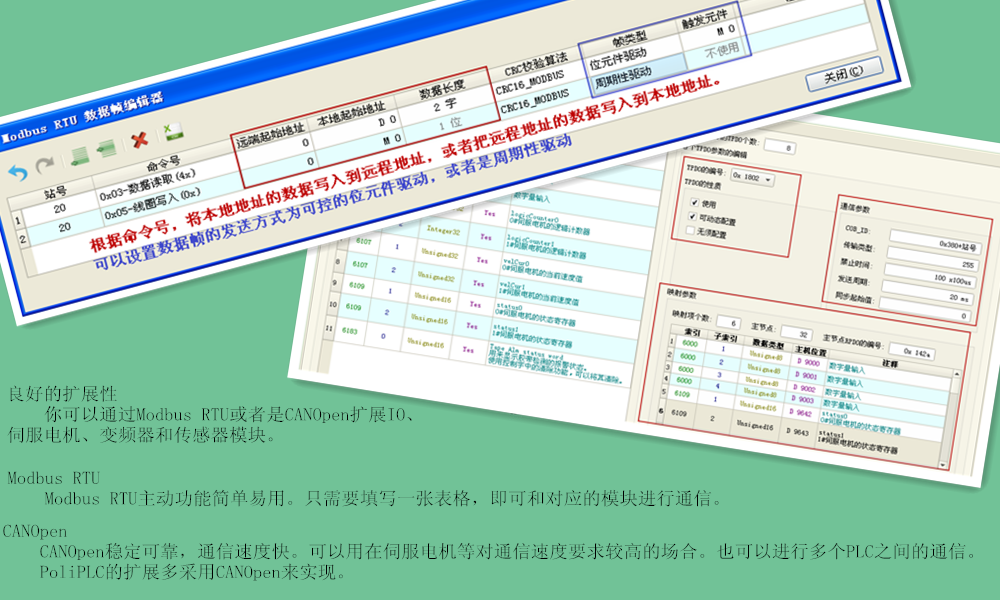
Ø 完善的Modbus通信支持。Modbus RTU從動協議可以連接觸摸屏,進行程序和設備的監控和操作;Modbus RTU主動協議可以用來連接遠程IO,變頻器等;Modbus TCP從動協議也可以用來連接觸摸屏,甚至可以實現遠程調試、遠程監控、遠程系統程序升級、固件升級等功能。如果你能夠編寫手機程序,甚至可以實現在手機上通過Modbus TCP對設備運行情況的監視;或者如果你能夠編寫電腦程序的話,也可以通過ModbusTCP讀取PoliPLC的運行數據連接到你公司的數據庫中,從而實現全面的數據管理。
Ø CanOpen現場總線的支持。每一臺PoliPLC既可以配置為CanOpen主節點,也可以配置為CanOpen從節點,從而實現多臺PoliPLC連接成一個網絡的功能;而且每個PoliPLC都能夠擴展最多20個CanOpen總線型伺服電機(支持位置、速度、轉矩、回原點模式)以及其它CanOpen從設備(不包含在20個之內);當總節點數多于110個時,可以通過網橋實現更多的節點連接。
 滬公網安備31010802001143號
滬公網安備31010802001143號

