���M(j��n)늙C(j��)�Y(ji��)��(g��u)����ԭ��
1. ���M(j��n)늙C(j��)�nj���}�_��̖(h��o)�D(zhu��n)׃?y��u)��λ�ƻ�λ�Ƶ��_�h(hu��n)����Ԫ�����ڷdz��d����r�£�늙C(j��)���D(zhu��n)�٣�ֹͣ��λ��ֻȡ�Q�ڿ����}�_��̖(h��o)���l�ʺ��}�_��(sh��)
2. �}�_��(sh��)Խ�࣬늙C(j��)�D(zhu��n)��(d��ng)�ĽǶ�Խ��
3. �}�_���l��Խ�ߣ�늙C(j��)�D(zhu��n)��Խ�죬�����ܳ��^����l�ʣ���t늙C(j��)������Ѹ�ٜpС��늙C(j��)���D(zhu��n)��
���M(j��n)늙C(j��)�ķN�
�����خa(ch��n)����ԭ���֞鷴��(y��ng)ʽ�ͼ���ʽ��Ŀǰ�҇�ʹ�õĴ��Ƿ���(y��ng)ʽ��
����(y��ng)ʽ���D(zhu��n)�ӟo�@�M���ɱ����ŵĶ��Ӯa(ch��n)������(y��ng)���،�(sh��)�F(xi��n)���M(j��n)�\(y��n)��
����ʽ�������D(zhu��n)�Ӿ��м����@�M�����D(zhu��n)�������ô�䓣�����늴����،�(sh��)�F(xi��n)���M(j��n)
��ݔ�����ش�С�֞��ŷ�ʽ����ʽ
�ŷ�ʽ��ݔ�������ڰٷ�֮����ʮ��֮�ף�N*M��ֻ���(q��)��(d��ng)�^С��ؓ(f��)�d��Ҫ�cҺ����֪�Ŵ������ã������(q��)��(d��ng)�C(j��)�������_(t��i)��Ȧ��ؓ(f��)�d
����ʽ��ݔ��������5-50N*M���ϣ�����ֱ���(q��)��(d��ng)�C(j��)�������_(t��i)��Ȧ��ؓ(f��)�d
�����Ӕ�(sh��)�֞�ζ���ʽ���p����ʽ��������ʽ���ඨ��ʽ
�������@�M�ֲ��֞鏽��ֲ�ʽ���S��ֲ�ʽ
����ֲ�ʽ��늙C(j��)���ఴ�A����������
�S��ֲ�ʽ��늙C(j��)���ఴ�S����������

����������
���M(j��n)늙C(j��)�Ĺ���ԭ�팍(sh��)�H����늴��F������ԭ����


ͨ늺��(hu��)����������X
A-B-C-A �r(sh��)����r(sh��)� A-C-B-A �r(sh��)��형r(sh��)� �@�ɷN������ʽ�r(sh��)����������
��������A-AB-B-BC-C-CA-A
�����p���� AB-BC-CA-AB
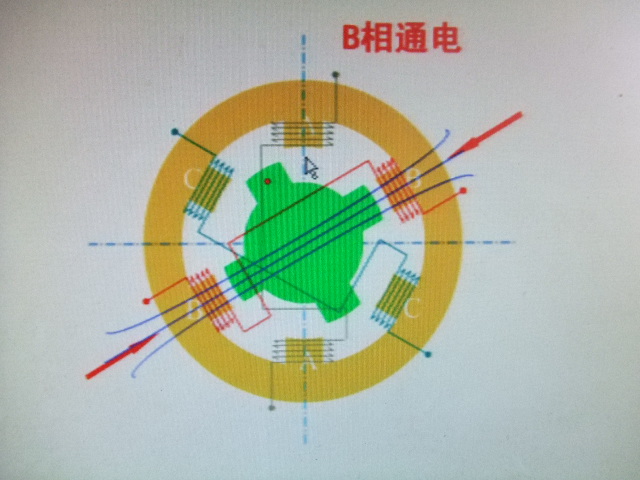
��(d��ng)ij�ඨ�ӄ�(l��)�ź��������D(zhu��n)�ӣ��D(zhu��n)�ӵ��X�cԓ�ඨ�ӴŘO�ϵ��X��(du��)�R���D(zhu��n)���D(zhu��n)��(d��ng)һ��(g��)�Ƕȣ��Qһ���늕r(sh��)���D(zhu��n)�����D(zhu��n)��(d��ng)һ��(g��)�Ƕȡ����ÿ�ͣ��݆��ͨ늣��D(zhu��n)�Ӳ�ͣ���D(zhu��n)��(d��ng)��
늙C(j��)�\(y��n)�еķ����ͨ늵��������P(gu��n)����׃ͨ늵�����늙C(j��)���\(y��n)�з���Ҳ��׃
�����; 늙C(j��)ÿ���D(zhu��n)��(d��ng)�ĽǶ�
����ǣ�360/��mzk)
M�鶨���@�M������(sh��)��Z���D(zhu��n)�ӵ��X��(sh��)��M��M�ĕr(sh��)K��1��M��2M�ĕr(sh��)K��2
[ ���N��uthman��2008-07-18 23:57���¾� ]
 �����W(w��ng)����31010802001143̖(h��o)
�����W(w��ng)����31010802001143̖(h��o)

