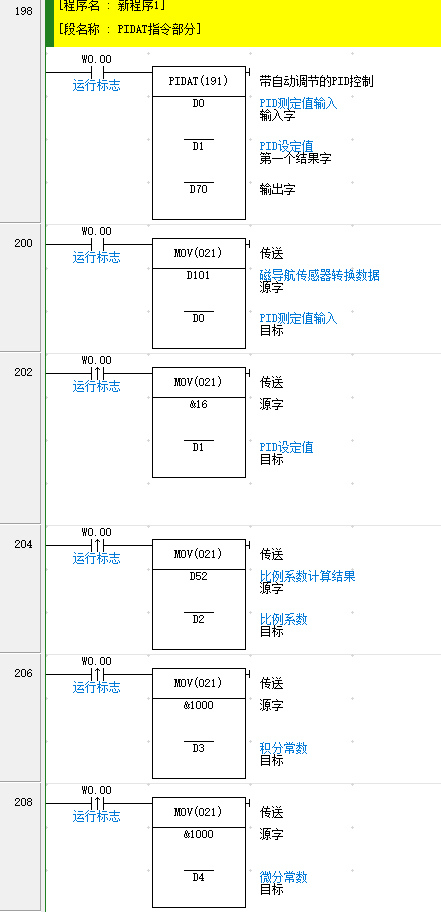

如題。我這是循跡小車,類似AGV的小車,用磁條導航。現在小車行駛糾正使用PID功能。我目前用的是歐姆龍CP1E-NA20,它只有PIDAT指令。說明書里說,控制字C+9的第15位為0不開啟自整定功能。因為循跡小車要使用階躍響應法,磁導航數據是實時變化的,開啟自整定就是用極限循環法自動求出PID參數了,這不是我需要的,因此C+9的第15位我設置為0了,即圖中的D10,我設置為了#8001,所以不開啟自整定,C+9和C+10也就都不工作了
我把磁導航的參數轉換成了1-31,一共31個數據,循跡小車走正中時數據應該是16。所以16作為PIDAT的目標值(圖中D1),沒問題。PIDAT的測定值(圖中D0)是實時傳輸過來的,所以當它不等于16的時候,PIDAT應該有輸出才對。我知道PIDAT使用時不能使用離線模擬,我也是傳輸到小車上測試的,但是始終沒有輸出。
這套方案我使用三菱的PLC是可行的,但是歐姆龍這個沒輸出是怎么回事,有人能幫幫忙嗎?
D0是PID測定值,根據磁條檢測位置從1-31變化
D1是PID設定值,即16,為1-31的正中間
D2是比例系數,也是實時傳輸的。我設定磁導航檢測靠邊就增大比例系數,在中間就減小比例系數
D3和D4分別是積分常數和微分常數
D5是采樣周期,我設定0.2秒,遠大于掃描周期
D6是濾波系數,說明書說一般設定0.65即可
D7是一些設定,也是按照規定設定的
D8和D9是對PIDAT運算后的輸出值限定大小范圍的
這些設定都沒問題,為什么PIDAT沒有任何輸出,輸出始終是0呢?
 滬公網安備31010802001143號
滬公網安備31010802001143號

