圖片:
PLC:Q03UDVCPU一個 定位模塊:運動模塊QD77MS4一個 三菱伺服MR-JE-20B兩個
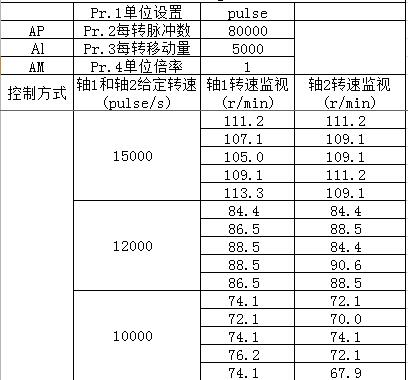
用JOG模式控制2個伺服電機恒定轉速運行,但是在實際監視過程中,發現,轉速恒定不下來,總是在跳動,轉速如下
請問大家,如何能控制2個伺服電機恒定轉速,或者控制在±1r/min的范圍內跳動。
| [td=1,1,73] [/td] [td=1,1,127]Pr.1單位設置[/td] [td=1,1,94]pulse[/td] [td=1,1,111][/td] |
| [td]AP[/td] [td]Pr.2每轉脈沖數[/td] [td]80000[/td] [td=1,3][/td] |
| [td]Al[/td] [td]Pr.3每轉移動量[/td] [td]5000[/td] |
| [td]AM[/td] [td]Pr.4單位倍率[/td] [td]1[/td] |
| [td]控制方式[/td] [td=1,1,127]軸1和軸2給定轉速(pulse/s)[/td] [td=1,1,94]軸1轉速監視(r/min)[/td] [td=1,1,111]軸2轉速監視(r/min)[/td] |
| [td=1,5,127]15000 [/td] [td=1,1,94]111.2 [/td] [td=1,1,111]111.2 [/td] |
| [td]107.1 [/td] [td]109.1 [/td] |
| [td]105.0 [/td] [td]109.1 [/td] |
| [td]109.1 [/td] [td]111.2 [/td] |
[td]113.3 [/td] [td]109.1
[/td] |
| [td=1,5,127]12000 [/td] [td=1,1,94]84.4 [/td] [td=1,1,111]84.4 [/td] |
| [td]86.5 [/td] [td]88.5 [/td] |
| [td]88.5 [/td] [td]84.4 [/td] |
| [td]88.5 [/td] [td]90.6 [/td] |
| [td]86.5 [/td] [td]88.5 [/td] |
| [td=1,5,127]6000 [/td] [td=1,1,94]43.2 [/td] [td=1,1,111]47.3 [/td] |
| [td]45.3 [/td] [td]43.2 [/td] |
| [td]45.3 [/td] [td]45.3 [/td] |
| [td]43.2 [/td] [td]43.2 [/td] |
| [td]43.2 [/td] [td]41.2 [/td] |
 滬公網安備31010802001143號
滬公網安備31010802001143號

